Connect and share knowledge within a single location that is structured and easy to search. You can drag the poles and zeros, but because the generating differential equation is assumed to have real coefficients, all complex poles and zeros occur as complex conjugates. To learn more, see our tips on writing great answers. 0000005778 00000 n
0000043742 00000 n
 If you know the locations of the poles and zeros, you have a lot of information about how the system will 0000033405 00000 n
Need some ease stuf to learn about poles and zero,s I bow that a pole is the -3dB point and a zero where it cross 0 dB. And the answer to the rest of the figures is also similar. Zeros:-Zeros are the frequencies of the transfer function for which the value of The DC motor modeled in Example 2.1.1 above is used in a position control system where the objective is to maintain a certain shaft angle\(\theta(t)\). This tool seems to be getting the signs for b1 and b2 the wrong way round, although that depends on how you write your equation; 0000002721 00000 n
Signal Processing Stack Exchange is a question and answer site for practitioners of the art and science of signal, image and video processing. Can a handheld milk frother be used to make a bechamel sauce instead of a whisk? Complex roots are the imaginary roots of a function. 0000040987 00000 n
0000021850 00000 n
The pole/zero plot of the example lead-lag compensator: See the PI Controller : THEORY + DEMO article for more details. But since I also calculated and display the coefficients, of course it could have been derived from the coefficients (as in Evaluating filter frequency response). How to calculate the magnitude of frequency response from Pole zero plot.
If you know the locations of the poles and zeros, you have a lot of information about how the system will 0000033405 00000 n
Need some ease stuf to learn about poles and zero,s I bow that a pole is the -3dB point and a zero where it cross 0 dB. And the answer to the rest of the figures is also similar. Zeros:-Zeros are the frequencies of the transfer function for which the value of The DC motor modeled in Example 2.1.1 above is used in a position control system where the objective is to maintain a certain shaft angle\(\theta(t)\). This tool seems to be getting the signs for b1 and b2 the wrong way round, although that depends on how you write your equation; 0000002721 00000 n
Signal Processing Stack Exchange is a question and answer site for practitioners of the art and science of signal, image and video processing. Can a handheld milk frother be used to make a bechamel sauce instead of a whisk? Complex roots are the imaginary roots of a function. 0000040987 00000 n
0000021850 00000 n
The pole/zero plot of the example lead-lag compensator: See the PI Controller : THEORY + DEMO article for more details. But since I also calculated and display the coefficients, of course it could have been derived from the coefficients (as in Evaluating filter frequency response). How to calculate the magnitude of frequency response from Pole zero plot.  WebFree Pre-Algebra, Algebra, Trigonometry, Calculus, Geometry, Statistics and Chemistry calculators step-by-step
WebFree Pre-Algebra, Algebra, Trigonometry, Calculus, Geometry, Statistics and Chemistry calculators step-by-step  0000037809 00000 n
The shaded region indicates the ROC chosen for the filter. But the zero pulls downto -infinity when its on the unit circle. \[H(s)=\frac{s+1}{\left(s-\frac{1}{2}\right)\left(s+\frac{3}{4}\right)} \nonumber \], The poles are: \(\left\{\frac{1}{2},-\frac{3}{4}\right\}\). By clicking Post Your Answer, you agree to our terms of service, privacy policy and cookie policy. 0000033547 00000 n
0000043602 00000 n
Please leave us a comment regarding the content, The scope is clickable & draggable. As you have guessed correctly, zeros come from numerator. Observe the change in the magnitude and phase Bode plots. 0000037087 00000 n
Improving the copy in the close modal and post notices - 2023 edition, determining type of filter given its pole zero plot, Identifying the magnitude and impulse response from pole zero plot quickly. The best answers are voted up and rise to the top, Start here for a quick overview of the site, Detailed answers to any questions you might have, Discuss the workings and policies of this site.
0000037809 00000 n
The shaded region indicates the ROC chosen for the filter. But the zero pulls downto -infinity when its on the unit circle. \[H(s)=\frac{s+1}{\left(s-\frac{1}{2}\right)\left(s+\frac{3}{4}\right)} \nonumber \], The poles are: \(\left\{\frac{1}{2},-\frac{3}{4}\right\}\). By clicking Post Your Answer, you agree to our terms of service, privacy policy and cookie policy. 0000033547 00000 n
0000043602 00000 n
Please leave us a comment regarding the content, The scope is clickable & draggable. As you have guessed correctly, zeros come from numerator. Observe the change in the magnitude and phase Bode plots. 0000037087 00000 n
Improving the copy in the close modal and post notices - 2023 edition, determining type of filter given its pole zero plot, Identifying the magnitude and impulse response from pole zero plot quickly. The best answers are voted up and rise to the top, Start here for a quick overview of the site, Detailed answers to any questions you might have, Discuss the workings and policies of this site.  The transfer function has no finite zeros and poles are located at: \(s=0,-10.25\). Clearest description Ive ever read of poles and zeroes in the real world. The complex poleshave: \({\omega }_n=\sqrt{2} \frac{rad}{s}, \zeta =\frac{1}{\sqrt{2}}\). A second-order model with its complex poles located at: \(s=-\sigma \pm j\omega\)is described by the transfer function: \[G\left(s\right)=\frac{K}{{\left(s+\sigma \right)}^2+{\omega }^2}.\]. By clicking Accept all cookies, you agree Stack Exchange can store cookies on your device and disclose information in accordance with our Cookie Policy. How to calculate the magnitude of frequency response from Pole zero plot. 0000042052 00000 n
)%2F11%253A_Laplace_Transform_and_Continuous_Time_System_Design%2F11.05%253A_Poles_and_Zeros_in_the_S-Plane, \( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}}}\) \( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{#1}}} \)\(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\) \(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\)\(\newcommand{\AA}{\unicode[.8,0]{x212B}}\), 11.6: Region of Convergence for the Laplace Transform, Introduction to Poles and Zeros of the Laplace-Transform, Interactive Demonstration of Poles and Zeros, Pole/Zero Plots and the Region of Convergence, status page at https://status.libretexts.org. Required fields are marked *. Call the second factor g ( z). The roots are the points where the function intercept with the x-axis What are complex roots? A springmassdamper system has a transfer function: Its characteristic equation is given as: \(ms^s+bs+k=0\), whose roots are characterized by the sign of the discriminant, \(\Delta =b^{2} -4mk\). Anyway, I got the following output. 0000029450 00000 n
The transfer function has no finite zeros and poles are located at: \(s=0,-10.25\). Clearest description Ive ever read of poles and zeroes in the real world. The complex poleshave: \({\omega }_n=\sqrt{2} \frac{rad}{s}, \zeta =\frac{1}{\sqrt{2}}\). A second-order model with its complex poles located at: \(s=-\sigma \pm j\omega\)is described by the transfer function: \[G\left(s\right)=\frac{K}{{\left(s+\sigma \right)}^2+{\omega }^2}.\]. By clicking Accept all cookies, you agree Stack Exchange can store cookies on your device and disclose information in accordance with our Cookie Policy. How to calculate the magnitude of frequency response from Pole zero plot. 0000042052 00000 n
)%2F11%253A_Laplace_Transform_and_Continuous_Time_System_Design%2F11.05%253A_Poles_and_Zeros_in_the_S-Plane, \( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}}}\) \( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{#1}}} \)\(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\) \(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\)\(\newcommand{\AA}{\unicode[.8,0]{x212B}}\), 11.6: Region of Convergence for the Laplace Transform, Introduction to Poles and Zeros of the Laplace-Transform, Interactive Demonstration of Poles and Zeros, Pole/Zero Plots and the Region of Convergence, status page at https://status.libretexts.org. Required fields are marked *. Call the second factor g ( z). The roots are the points where the function intercept with the x-axis What are complex roots? A springmassdamper system has a transfer function: Its characteristic equation is given as: \(ms^s+bs+k=0\), whose roots are characterized by the sign of the discriminant, \(\Delta =b^{2} -4mk\). Anyway, I got the following output. 0000029450 00000 n
 0000027113 00000 n
It would also be very nice if the frequency on the -3dB point of the graph would be readable in some way. It only takes a minute to sign up. What is a root function? I hope my code is not wrong. %PDF-1.3
%
0000027113 00000 n
It would also be very nice if the frequency on the -3dB point of the graph would be readable in some way. It only takes a minute to sign up. What is a root function? I hope my code is not wrong. %PDF-1.3
%
 Th amp did work with 3.9 K and 47 Pf cap, ascilate on 4.5 Khz, and had a quite good control over the 60 Khz butterworth with a square test. An JavaScript remake of the old Java-based pole-zero placement appletvisit that page for tips on pole-zero locations for standard biquads. More damping has the effect of less percent overshoot, and slower settling time. Pole-Zero Plot On macOS installs in languages other than English, do folders such as Desktop, Documents, and Downloads have localized names? WebFigure 1: The pole-zero plot for a typical third-order system with one real pole and a complex conjugate pole pair, and a single real zero. Then you put the values of poles as 'X' marks and zeros as 'O' marks. For the following parameter values: \(R=1\Omega ,\; L=0.01H,\; J=0.01\; kgm^{2} ,\; b=0.1\; \frac{N-s}{rad} ,\; and\; k_{t} =k_{b} =0.05\), the transfer function from armature voltage to angular velocity is given as: \[\frac{\omega (s)}{V_{ a} (s)} =\frac{500}{(s+100)(s+10)+25} =\frac{500}{(s+10.28)(s+99.72)}\]. Using the above parameter values in the reduced-order DC motor model, the system transfer function is given as: \[G(s)=\frac{\theta (s)}{V_{ a} (s)} =\frac{5}{s(s+10.25)}=\frac{0.49}{s(0.098 s+1)}\]. 0000036700 00000 n
Pole-Zero Plots are clearly quite useful in the study of the Laplace and Z transform, affording us a method of visualizing the at times confusing mathematical functions. If this were to occur a tremendous amount of volatility is created in that area, since there is a change from infinity at the pole to zero at the zero in a very small range of signals. A much better way is to use control theory to move the pole to a better place. .
Th amp did work with 3.9 K and 47 Pf cap, ascilate on 4.5 Khz, and had a quite good control over the 60 Khz butterworth with a square test. An JavaScript remake of the old Java-based pole-zero placement appletvisit that page for tips on pole-zero locations for standard biquads. More damping has the effect of less percent overshoot, and slower settling time. Pole-Zero Plot On macOS installs in languages other than English, do folders such as Desktop, Documents, and Downloads have localized names? WebFigure 1: The pole-zero plot for a typical third-order system with one real pole and a complex conjugate pole pair, and a single real zero. Then you put the values of poles as 'X' marks and zeros as 'O' marks. For the following parameter values: \(R=1\Omega ,\; L=0.01H,\; J=0.01\; kgm^{2} ,\; b=0.1\; \frac{N-s}{rad} ,\; and\; k_{t} =k_{b} =0.05\), the transfer function from armature voltage to angular velocity is given as: \[\frac{\omega (s)}{V_{ a} (s)} =\frac{500}{(s+100)(s+10)+25} =\frac{500}{(s+10.28)(s+99.72)}\]. Using the above parameter values in the reduced-order DC motor model, the system transfer function is given as: \[G(s)=\frac{\theta (s)}{V_{ a} (s)} =\frac{5}{s(s+10.25)}=\frac{0.49}{s(0.098 s+1)}\]. 0000036700 00000 n
Pole-Zero Plots are clearly quite useful in the study of the Laplace and Z transform, affording us a method of visualizing the at times confusing mathematical functions. If this were to occur a tremendous amount of volatility is created in that area, since there is a change from infinity at the pole to zero at the zero in a very small range of signals. A much better way is to use control theory to move the pole to a better place. .  A first-order system with an integrator is described by the transfer function: \[G\left(s\right)=\frac{K}{s(\tau s+1)}\]. Scenario: 1 pole/zero: can be on real-axis only. WebExample: Transfer Function Pole-Zero. rev2023.4.5.43379. 11: Laplace Transform and Continuous Time System Design, { "11.01:_Laplace_Transform" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.
A first-order system with an integrator is described by the transfer function: \[G\left(s\right)=\frac{K}{s(\tau s+1)}\]. Scenario: 1 pole/zero: can be on real-axis only. WebExample: Transfer Function Pole-Zero. rev2023.4.5.43379. 11: Laplace Transform and Continuous Time System Design, { "11.01:_Laplace_Transform" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "11.02:_Common_Laplace_Transforms" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "11.03:_Properties_of_the_Laplace_Transform" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "11.04:_Inverse_Laplace_Transform" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "11.05:_Poles_and_Zeros_in_the_S-Plane" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "11.06:_Region_of_Convergence_for_the_Laplace_Transform" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "11.07:_Rational_Functions_and_the_Laplace_Transform" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "11.08:_Differential_Equations" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "11.09:_Continuous_Time_Filter_Design" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()" }, { "00:_Front_Matter" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "01:_Introduction_to_Signals" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "02:_Introduction_to_Systems" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "03:_Time_Domain_Analysis_of_Continuous_Time_Systems" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "04:_Time_Domain_Analysis_of_Discrete_Time_Systems" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "05:_Introduction_to_Fourier_Analysis" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "06:_Continuous_Time_Fourier_Series_(CTFS)" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "07:_Discrete_Time_Fourier_Series_(DTFS)" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "08:_Continuous_Time_Fourier_Transform_(CTFT)" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "09:_Discrete_Time_Fourier_Transform_(DTFT)" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "10:_Sampling_and_Reconstruction" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "11:_Laplace_Transform_and_Continuous_Time_System_Design" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "12:_Z-Transform_and_Discrete_Time_System_Design" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "13:_Capstone_Signal_Processing_Topics" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "14:_Appendix_A-_Linear_Algebra_Overview" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "15:_Appendix_B-_Hilbert_Spaces_Overview" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "16:_Appendix_C-_Analysis_Topics_Overview" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "17:_Appendix_D-_Viewing_Interactive_Content" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "zz:_Back_Matter" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()" }, [ "article:topic", "license:ccby", "showtoc:no", "causal", "authorname:rbaraniuk", "poles", "pole-zero cancellation", "stable", "control theory", "program:openstaxcnx" ], https://eng.libretexts.org/@app/auth/3/login?returnto=https%3A%2F%2Feng.libretexts.org%2FBookshelves%2FElectrical_Engineering%2FSignal_Processing_and_Modeling%2FSignals_and_Systems_(Baraniuk_et_al. In that case the signs are wrong, or rather, inconsistent with how you write the direct forms. It is possible to have more than one pole or zero at any given point. This shows \(z = 0\) is a pole of order 3. .  Your email address will not be published. WebThe zeros of a polynomial calculator can find all zeros or solution of the polynomial equation P (x) = 0 by setting each factor to 0 and solving for x. Think of poles as controlling a frequency-dependent feedback or resonancethe impulse response of a pole inside the unit circle decays, while one outside is like runaway feedback (think of a mic feeding back into a loudspeaker). No, because you accept what that type of filter gives you.) when Basically what we can gather from this is that the magnitude of the transfer function will be larger when it is closer to the poles and smaller when it is closer to the zeros. Info: Only the first (green) transfer function is configurable. Look here, what values of $z$ will turn the transfer function tend to infinity? Making statements based on opinion; back them up with references or personal experience. As you have guessed correctly, zeros come from numerator. Suppose you are given a system with transfer function, $$H(z)=\frac{(1-3z^{-1})(1-7z^{-1})}{(1-4z^{-1})(1-6z^{-1})} $$. Determining which Filter from a Z-Plane Plots? [9 Should I (still) use UTC for all my servers? What is a root function? As you have guessed correctly, zeros come from numerator. 0000027550 00000 n
WebThe real part of each pole (or zero) provides the x-component and the imaginary part, the y-component in the complex plane. How to obtain digital IIR filter coefficients for known z-plane zero-pole plot? I don't see anything in that figure given in the solution. We remind you of the following terminology: Suppose \(f(z)\) is analytic at \(z_0\) and, \[f(z) = a_n (z - z_0)^n + a_{n + 1} (z - z_0)^{n + 1} + \ ,\]. WebMove the pole/zero around the plane. The style of argument is the same in each case. At z = 0: f ( z) = 1 z 3 z + 1 z 2 + 1. I think I got my mistake. Up to three plots can be shown at the same time. For the following parameter values: \(R=1\Omega ,\; L=0.01H,\; J=0.01\; kgm^{2} ,\; b=0.1\; \frac{N-s}{rad} ,\; and\; k_{t} =k_{b} =0.05\), the motor transfer function evaluates as: \[G(s)=\frac{\omega (s)}{V_{ a} (s)} =\frac{5}{s+10.25}=\frac{0.49}{0.098 s+1}\]. Browse other questions tagged, Start here for a quick overview of the site, Detailed answers to any questions you might have, Discuss the workings and policies of this site. 0000021140 00000 n
Once the zeroes/poles are moved/added/deleted, the original calculation will not hold true any more. There are several examples in the Topic 8 notes. Is this wrong? 0000047664 00000 n
While I was at it, I improved the log tick value scaling. Below is a simple transfer function with the poles and zeros shown below it. A pole on the unit circle gives a sustained oscillation (but watch out for numerical errorskeep your poles inside the unit circle, typically). I can't seem to figure out the difference. Poles and zeros are defining characteristics of a filter. 0000042877 00000 n
Stack Exchange network consists of 181 Q&A communities including Stack Overflow, the largest, most trusted online community for developers to learn, share their knowledge, and build their careers. Why can I not self-reflect on my own writing critically? Making statements based on opinion; back them up with references or personal experience. To visualize the frequency plot, I wrote the following Python code. If you know the locations of the poles and zeros, you have a lot of information about how the system will We define N(s) and D(s) to be the numerator and denominator polynomials, as such: So we have a zero at s -2. 70 0 obj
<<
/Linearized 1
/O 72
/H [ 1915 828 ]
/L 169613
/E 50461
/N 13
/T 168095
>>
endobj
xref
70 74
0000000016 00000 n
with \(a_n \ne 0\). 0000029910 00000 n
But Im not going to edit articles going back to 2003, so yes, a in the numerator here , How do you calculate the coefficients from the poles to get the frequency response? To embed this widget in a post on your WordPress blog, copy and paste the shortcode below into the HTML source: To add a widget to a MediaWiki site, the wiki must have the. I mean, what are those strange lines supposed to be that extend over all the figures? Legal. WebPoles are at locations marked with a red X and have the form . Could anybody help me with this? Do I really need plural grammatical number when my conlang deals with existence and uniqueness? Since g ( z) is analytic at z = 0 and g ( 0) = 1, it has a Taylor series [more] Lead compensation achieves the desired result through the merits of its phase lead contribution. The main additions are input fields for precision pole-zero placement, and an option to display the response with a log frequency scale. Thanks for contributing an answer to Signal Processing Stack Exchange! But I stil not understand how to do that, I have now with ltspice simulated, I did have to use small capcitor and 3,9k resistor to get 500 Khz, but making capacitor bigger it jumps to 1.5 Mhz oscillation. 1.1 The Pole-Zero Plot A system is characterized by its poles and zeros in the sense that they allow reconstruction of the input/output dierential equation. MathJax reference. In theory they are equivalent, as the pole and zero at \(s=1\) cancel each other out in what is known as pole-zero cancellation. Blue and red transfer functions are cleared when moving poles/zeroes in the plane. Excellent! Also, by starting with the pole/zero plot, one can design a filter and obtain its transfer function very easily. there is a small bump between $-\pi/2$ and $\pi/2$. WebPoles are at locations marked with a red X and have the form . A first-order system has a genericODE description: \(\tau \dot{y}\left(t\right)+y\left(t\right)=u(t)\), where \(u\left(t\right)\) and \(y\left(t\right)\) denote the input and the output, and \(\tau\) is the system time constant. The style of argument is the same in each case. WebGet the free "Zeros Calculator" widget for your website, blog, Wordpress, Blogger, or iGoogle. It is quite difficult to qualitatively analyze the Laplace transform (Section 11.1) and Z-transform, since mappings of their magnitude and phase or real part and imaginary part result in multiple mappings of 2-dimensional surfaces in 3-dimensional space. The pole zero-plot shows the locations of the zeros and poles of $H(s)$ or $H(z)$ in the complex plane. You can drag the poles and zeros, but because the generating differential equation is assumed to have real coefficients, all complex poles and zeros occur as complex conjugates. Book where Earth is invaded by a future, parallel-universe Earth.
Your email address will not be published. WebThe zeros of a polynomial calculator can find all zeros or solution of the polynomial equation P (x) = 0 by setting each factor to 0 and solving for x. Think of poles as controlling a frequency-dependent feedback or resonancethe impulse response of a pole inside the unit circle decays, while one outside is like runaway feedback (think of a mic feeding back into a loudspeaker). No, because you accept what that type of filter gives you.) when Basically what we can gather from this is that the magnitude of the transfer function will be larger when it is closer to the poles and smaller when it is closer to the zeros. Info: Only the first (green) transfer function is configurable. Look here, what values of $z$ will turn the transfer function tend to infinity? Making statements based on opinion; back them up with references or personal experience. As you have guessed correctly, zeros come from numerator. Suppose you are given a system with transfer function, $$H(z)=\frac{(1-3z^{-1})(1-7z^{-1})}{(1-4z^{-1})(1-6z^{-1})} $$. Determining which Filter from a Z-Plane Plots? [9 Should I (still) use UTC for all my servers? What is a root function? As you have guessed correctly, zeros come from numerator. 0000027550 00000 n
WebThe real part of each pole (or zero) provides the x-component and the imaginary part, the y-component in the complex plane. How to obtain digital IIR filter coefficients for known z-plane zero-pole plot? I don't see anything in that figure given in the solution. We remind you of the following terminology: Suppose \(f(z)\) is analytic at \(z_0\) and, \[f(z) = a_n (z - z_0)^n + a_{n + 1} (z - z_0)^{n + 1} + \ ,\]. WebMove the pole/zero around the plane. The style of argument is the same in each case. At z = 0: f ( z) = 1 z 3 z + 1 z 2 + 1. I think I got my mistake. Up to three plots can be shown at the same time. For the following parameter values: \(R=1\Omega ,\; L=0.01H,\; J=0.01\; kgm^{2} ,\; b=0.1\; \frac{N-s}{rad} ,\; and\; k_{t} =k_{b} =0.05\), the motor transfer function evaluates as: \[G(s)=\frac{\omega (s)}{V_{ a} (s)} =\frac{5}{s+10.25}=\frac{0.49}{0.098 s+1}\]. Browse other questions tagged, Start here for a quick overview of the site, Detailed answers to any questions you might have, Discuss the workings and policies of this site. 0000021140 00000 n
Once the zeroes/poles are moved/added/deleted, the original calculation will not hold true any more. There are several examples in the Topic 8 notes. Is this wrong? 0000047664 00000 n
While I was at it, I improved the log tick value scaling. Below is a simple transfer function with the poles and zeros shown below it. A pole on the unit circle gives a sustained oscillation (but watch out for numerical errorskeep your poles inside the unit circle, typically). I can't seem to figure out the difference. Poles and zeros are defining characteristics of a filter. 0000042877 00000 n
Stack Exchange network consists of 181 Q&A communities including Stack Overflow, the largest, most trusted online community for developers to learn, share their knowledge, and build their careers. Why can I not self-reflect on my own writing critically? Making statements based on opinion; back them up with references or personal experience. To visualize the frequency plot, I wrote the following Python code. If you know the locations of the poles and zeros, you have a lot of information about how the system will We define N(s) and D(s) to be the numerator and denominator polynomials, as such: So we have a zero at s -2. 70 0 obj
<<
/Linearized 1
/O 72
/H [ 1915 828 ]
/L 169613
/E 50461
/N 13
/T 168095
>>
endobj
xref
70 74
0000000016 00000 n
with \(a_n \ne 0\). 0000029910 00000 n
But Im not going to edit articles going back to 2003, so yes, a in the numerator here , How do you calculate the coefficients from the poles to get the frequency response? To embed this widget in a post on your WordPress blog, copy and paste the shortcode below into the HTML source: To add a widget to a MediaWiki site, the wiki must have the. I mean, what are those strange lines supposed to be that extend over all the figures? Legal. WebPoles are at locations marked with a red X and have the form . Could anybody help me with this? Do I really need plural grammatical number when my conlang deals with existence and uniqueness? Since g ( z) is analytic at z = 0 and g ( 0) = 1, it has a Taylor series [more] Lead compensation achieves the desired result through the merits of its phase lead contribution. The main additions are input fields for precision pole-zero placement, and an option to display the response with a log frequency scale. Thanks for contributing an answer to Signal Processing Stack Exchange! But I stil not understand how to do that, I have now with ltspice simulated, I did have to use small capcitor and 3,9k resistor to get 500 Khz, but making capacitor bigger it jumps to 1.5 Mhz oscillation. 1.1 The Pole-Zero Plot A system is characterized by its poles and zeros in the sense that they allow reconstruction of the input/output dierential equation. MathJax reference. In theory they are equivalent, as the pole and zero at \(s=1\) cancel each other out in what is known as pole-zero cancellation. Blue and red transfer functions are cleared when moving poles/zeroes in the plane. Excellent! Also, by starting with the pole/zero plot, one can design a filter and obtain its transfer function very easily. there is a small bump between $-\pi/2$ and $\pi/2$. WebPoles are at locations marked with a red X and have the form . A first-order system has a genericODE description: \(\tau \dot{y}\left(t\right)+y\left(t\right)=u(t)\), where \(u\left(t\right)\) and \(y\left(t\right)\) denote the input and the output, and \(\tau\) is the system time constant. The style of argument is the same in each case. WebGet the free "Zeros Calculator" widget for your website, blog, Wordpress, Blogger, or iGoogle. It is quite difficult to qualitatively analyze the Laplace transform (Section 11.1) and Z-transform, since mappings of their magnitude and phase or real part and imaginary part result in multiple mappings of 2-dimensional surfaces in 3-dimensional space. The pole zero-plot shows the locations of the zeros and poles of $H(s)$ or $H(z)$ in the complex plane. You can drag the poles and zeros, but because the generating differential equation is assumed to have real coefficients, all complex poles and zeros occur as complex conjugates. Book where Earth is invaded by a future, parallel-universe Earth.  WebThe real part of each pole (or zero) provides the x-component and the imaginary part, the y-component in the complex plane.
WebThe real part of each pole (or zero) provides the x-component and the imaginary part, the y-component in the complex plane.  We also acknowledge previous National Science Foundation support under grant numbers 1246120, 1525057, and 1413739. 0000025971 00000 n
If \(n = 1\) we say \(z_0\) is a simple zero. A minor temperature change, for instance, could cause one of them to move just slightly. As seen from the figure, \({\omega }_n\) equals the magnitude of the complex pole, and \(\zeta =\frac{\sigma }{{\omega }_n}={\cos \theta }\), where \(\theta\) is the angle subtended by the complex poleat the origin. Same for omega = +/- inf. Ill keep that in mind for the next time I have a chance to improve things. For a lowpass, youd normally put it at an angle of pi and magnitude 1, to pull down at half the sample rate. Scenario: 1 pole/zero: can be on real-axis only. In this case, zeros are z = 3 and z = 7, cause if you put z = 3 or z = 7, the numerator will be zero, that means the whole transfer function will be zero. The damping ratio, , is a dimensionless quantity that characterizes the decay of the oscillations in the systems natural response. 0000040061 00000 n
Here is one more, \[f(z) = \dfrac{z + 1}{z^3 (z^2 + 1)} \nonumber\]. Here a coefficients represents numerator, right? As \(\zeta \to 1\), the complex poles are located close to the real axis as \(s_{1,2}\cong -\zeta {\omega }_n\). The solutions are the roots of the function. We will discuss this later. The motor time constants are given as: \(\tau _{e} \cong \frac{L}{R}=10 \;ms,\; \tau _ m \cong \frac{J}{b}=100\; ms\). WebTemplate part has been deleted or is unavailable: header poles and zeros calculator The transfer function poles are located at: \(s=-10.28, -99.72\).
We also acknowledge previous National Science Foundation support under grant numbers 1246120, 1525057, and 1413739. 0000025971 00000 n
If \(n = 1\) we say \(z_0\) is a simple zero. A minor temperature change, for instance, could cause one of them to move just slightly. As seen from the figure, \({\omega }_n\) equals the magnitude of the complex pole, and \(\zeta =\frac{\sigma }{{\omega }_n}={\cos \theta }\), where \(\theta\) is the angle subtended by the complex poleat the origin. Same for omega = +/- inf. Ill keep that in mind for the next time I have a chance to improve things. For a lowpass, youd normally put it at an angle of pi and magnitude 1, to pull down at half the sample rate. Scenario: 1 pole/zero: can be on real-axis only. In this case, zeros are z = 3 and z = 7, cause if you put z = 3 or z = 7, the numerator will be zero, that means the whole transfer function will be zero. The damping ratio, , is a dimensionless quantity that characterizes the decay of the oscillations in the systems natural response. 0000040061 00000 n
Here is one more, \[f(z) = \dfrac{z + 1}{z^3 (z^2 + 1)} \nonumber\]. Here a coefficients represents numerator, right? As \(\zeta \to 1\), the complex poles are located close to the real axis as \(s_{1,2}\cong -\zeta {\omega }_n\). The solutions are the roots of the function. We will discuss this later. The motor time constants are given as: \(\tau _{e} \cong \frac{L}{R}=10 \;ms,\; \tau _ m \cong \frac{J}{b}=100\; ms\). WebTemplate part has been deleted or is unavailable: header poles and zeros calculator The transfer function poles are located at: \(s=-10.28, -99.72\).  0000041295 00000 n
Though the magnitude is very small. How does sampling rate affect discrete filters? I guess youre talking about a first order filter. Stability of system with poles inside unit circle - conflict with differential equation, What is the reason behind complex conjugate pairs in Linear Phase FIR filter analysis from the Pole Zero plot, Understanding the Chebyshev2 Bandpass Filter Poles-Zeros Plot, LPF design with pole/zero placement at rejection at specified freq, How to assess cold water boating/canoeing safety, Security and Performance of Solidity Contract. Since \(g(z)\) is analytic at \(z = 0\) and \(g(0) = 1\), it has a Taylor series, \[g(z) = \dfrac{z + 1}{z^2 + 1} = 1 + a_1 z + a_2 z^2 + \ \nonumber\], \[f(z) = \dfrac{1}{z^3} + \dfrac{a_1}{z^2} + \dfrac{a_2}{z} + \ \nonumber\]. To obtain a good notch filter, put two poles close the two zeros on the semicircle as possible.
0000041295 00000 n
Though the magnitude is very small. How does sampling rate affect discrete filters? I guess youre talking about a first order filter. Stability of system with poles inside unit circle - conflict with differential equation, What is the reason behind complex conjugate pairs in Linear Phase FIR filter analysis from the Pole Zero plot, Understanding the Chebyshev2 Bandpass Filter Poles-Zeros Plot, LPF design with pole/zero placement at rejection at specified freq, How to assess cold water boating/canoeing safety, Security and Performance of Solidity Contract. Since \(g(z)\) is analytic at \(z = 0\) and \(g(0) = 1\), it has a Taylor series, \[g(z) = \dfrac{z + 1}{z^2 + 1} = 1 + a_1 z + a_2 z^2 + \ \nonumber\], \[f(z) = \dfrac{1}{z^3} + \dfrac{a_1}{z^2} + \dfrac{a_2}{z} + \ \nonumber\]. To obtain a good notch filter, put two poles close the two zeros on the semicircle as possible.  d. To separate the poles into their real and imaginary parts, first press B and type real(c1) . More information on second order systems can be found here. 0000040799 00000 n
{\displaystyle \omega ~=~\omega _{n}} This page titled 2.1: System Poles and Zeros is shared under a CC BY-NC-SA 4.0 license and was authored, remixed, and/or curated by Kamran Iqbal. 0000003181 00000 n
\(s_{1,2} =-\frac{b}{2m} \pm \sqrt{\left(\frac{b}{2m} \right)^{2} -\frac{k}{m} }.\), \(s_{1,2} =-\frac{b}{2m} \pm j\sqrt{\frac{k}{m} -\left(\frac{b}{2m} \right)^{2} }.\), Next, assume that the mass-spring-damper has the following parameter values: \(m=1, b=k=2\); then, its transfer function is given as: \[G(s)=\frac{1}{ms^2+bs+k}=\frac{1}{s^2+2s+2}\]. 0000025212 00000 n
0000020744 00000 n
I know to use the quadratic formula to get the opposite so I naively attempted making a quadratic using the poles but couldnt get the same result as the calculator. Since g ( z) is analytic at z = 0 and g ( 0) = 1, it has a Taylor series Should Philippians 2:6 say "in the form of God" or "in the form of a god"? As \(\zeta \to 0\), the complex poles are located close to the imaginary axis at: \(s\cong \pm j{\omega }_n\). WebTemplate part has been deleted or is unavailable: header poles and zeros calculator Thank you for catching that, Anthony. Then we say \(f\) has a pole of order \(n\) at \(z_0\). and , if exactly known for a second order system, the time responses can be easily plotted and stability can easily be checked. The Laplace-transform will have the below structure, based on Rational Functions (Section 12.7): The two polynomials, \(P(s)\) and \(Q(s)\), allow us to find the poles and zeros of the Laplace-Transform. Pole-Zero Plot Find the pole-zero representation of the system with the transfer function: First rewrite in our standard form (note: the polynomials were factored with a computer).
d. To separate the poles into their real and imaginary parts, first press B and type real(c1) . More information on second order systems can be found here. 0000040799 00000 n
{\displaystyle \omega ~=~\omega _{n}} This page titled 2.1: System Poles and Zeros is shared under a CC BY-NC-SA 4.0 license and was authored, remixed, and/or curated by Kamran Iqbal. 0000003181 00000 n
\(s_{1,2} =-\frac{b}{2m} \pm \sqrt{\left(\frac{b}{2m} \right)^{2} -\frac{k}{m} }.\), \(s_{1,2} =-\frac{b}{2m} \pm j\sqrt{\frac{k}{m} -\left(\frac{b}{2m} \right)^{2} }.\), Next, assume that the mass-spring-damper has the following parameter values: \(m=1, b=k=2\); then, its transfer function is given as: \[G(s)=\frac{1}{ms^2+bs+k}=\frac{1}{s^2+2s+2}\]. 0000025212 00000 n
0000020744 00000 n
I know to use the quadratic formula to get the opposite so I naively attempted making a quadratic using the poles but couldnt get the same result as the calculator. Since g ( z) is analytic at z = 0 and g ( 0) = 1, it has a Taylor series Should Philippians 2:6 say "in the form of God" or "in the form of a god"? As \(\zeta \to 0\), the complex poles are located close to the imaginary axis at: \(s\cong \pm j{\omega }_n\). WebTemplate part has been deleted or is unavailable: header poles and zeros calculator Thank you for catching that, Anthony. Then we say \(f\) has a pole of order \(n\) at \(z_0\). and , if exactly known for a second order system, the time responses can be easily plotted and stability can easily be checked. The Laplace-transform will have the below structure, based on Rational Functions (Section 12.7): The two polynomials, \(P(s)\) and \(Q(s)\), allow us to find the poles and zeros of the Laplace-Transform. Pole-Zero Plot Find the pole-zero representation of the system with the transfer function: First rewrite in our standard form (note: the polynomials were factored with a computer).  0000004730 00000 n
However, such a filter would not have unity gain at zero frequency, and the notch will not be sharp. The frequency response is obtained by using $z=e^{j\omega}$, and $\omega$ is in the range $[-\pi,\pi]$. This is generally a very bad way to try to eliminate a pole. Can an attorney plead the 5th if attorney-client privilege is pierced? H ( s) = s + 1 ( s 1 2) ( s + 3 4) The zeros are: { 1 } The poles are: { 1 2, 3 4 } The S-Plane Once the poles and zeros have been found for a given Laplace Transform, they can be plotted onto the S-Plane. trailer
<<
/Size 144
/Info 69 0 R
/Root 71 0 R
/Prev 168085
/ID[<3169e2266735f2d493a9078c501531bc><3169e2266735f2d493a9078c501531bc>]
>>
startxref
0
%%EOF
71 0 obj
<<
/Type /Catalog
/Pages 57 0 R
/JT 68 0 R
/PageLabels 55 0 R
>>
endobj
142 0 obj
<< /S 737 /L 897 /Filter /FlateDecode /Length 143 0 R >>
stream
We will show that z = 0 is a pole of order 3, z = i are poles of order 1 and z = 1 is a zero of order 1. The primary function of a lag compensator is to provide attenuation in the high-frequency range to give a system sufficient phase margin. Dba0X}]7b-} Of course, normalization is important in practical application, but be aware of it when visualizing how poles and zeros interact. The pole/zero plot of the example PI controller: A filter is typically applied to the measured signal - voltage, current, speed to remove undesired noise. To my understanding, pole-zero plots are used to analyze or visualize transfer functions. So here poles are $z=4$ and $z=6$, and zeros are $z=3$ and $z=7$. The corner frequency of all three filters is 100 rad/s. Zeros are the roots of N (s) (the numerator of the transfer function) obtained by setting N How does one calculate the pole-zero plot of such system? The values of the poles and the zeros of a system determine whether the system is stable, and how well the system performs. Hi Eugeneasked and answered a few times in comments on the site, but since you bring it up, Ill put together a short article explaining the choice. The arguments for \(z = -i\) and \(z = -1\) are similar. Let's say that we have a transfer function with 3 poles: The poles are located at s = l, m, n. Now, we can use partial fraction expansion to separate out the transfer function: Using the inverse transform on each of these component fractions (looking up the transforms in our table), we get the following: But, since s is a complex variable, l m and n can all potentially be complex numbers, with a real part () and an imaginary part (j). WebGet the free "Zeros Calculator" widget for your website, blog, Wordpress, Blogger, or iGoogle. If you know the locations of the poles and zeros, you have a lot of information about how the system will Complex Variables with Applications (Orloff), { "9.01:_Poles_and_Zeros" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.
0000004730 00000 n
However, such a filter would not have unity gain at zero frequency, and the notch will not be sharp. The frequency response is obtained by using $z=e^{j\omega}$, and $\omega$ is in the range $[-\pi,\pi]$. This is generally a very bad way to try to eliminate a pole. Can an attorney plead the 5th if attorney-client privilege is pierced? H ( s) = s + 1 ( s 1 2) ( s + 3 4) The zeros are: { 1 } The poles are: { 1 2, 3 4 } The S-Plane Once the poles and zeros have been found for a given Laplace Transform, they can be plotted onto the S-Plane. trailer
<<
/Size 144
/Info 69 0 R
/Root 71 0 R
/Prev 168085
/ID[<3169e2266735f2d493a9078c501531bc><3169e2266735f2d493a9078c501531bc>]
>>
startxref
0
%%EOF
71 0 obj
<<
/Type /Catalog
/Pages 57 0 R
/JT 68 0 R
/PageLabels 55 0 R
>>
endobj
142 0 obj
<< /S 737 /L 897 /Filter /FlateDecode /Length 143 0 R >>
stream
We will show that z = 0 is a pole of order 3, z = i are poles of order 1 and z = 1 is a zero of order 1. The primary function of a lag compensator is to provide attenuation in the high-frequency range to give a system sufficient phase margin. Dba0X}]7b-} Of course, normalization is important in practical application, but be aware of it when visualizing how poles and zeros interact. The pole/zero plot of the example PI controller: A filter is typically applied to the measured signal - voltage, current, speed to remove undesired noise. To my understanding, pole-zero plots are used to analyze or visualize transfer functions. So here poles are $z=4$ and $z=6$, and zeros are $z=3$ and $z=7$. The corner frequency of all three filters is 100 rad/s. Zeros are the roots of N (s) (the numerator of the transfer function) obtained by setting N How does one calculate the pole-zero plot of such system? The values of the poles and the zeros of a system determine whether the system is stable, and how well the system performs. Hi Eugeneasked and answered a few times in comments on the site, but since you bring it up, Ill put together a short article explaining the choice. The arguments for \(z = -i\) and \(z = -1\) are similar. Let's say that we have a transfer function with 3 poles: The poles are located at s = l, m, n. Now, we can use partial fraction expansion to separate out the transfer function: Using the inverse transform on each of these component fractions (looking up the transforms in our table), we get the following: But, since s is a complex variable, l m and n can all potentially be complex numbers, with a real part () and an imaginary part (j). WebGet the free "Zeros Calculator" widget for your website, blog, Wordpress, Blogger, or iGoogle. If you know the locations of the poles and zeros, you have a lot of information about how the system will Complex Variables with Applications (Orloff), { "9.01:_Poles_and_Zeros" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "9.02:_Holomorphic_and_Meromorphic_Functions" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "9.03:_Behavior_of_functions_near_zeros_and_poles" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "9.04:_Residues" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "9.05:_Cauchy_Residue_Theorem" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "9.06:_Residue_at" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()" }, { "00:_Front_Matter" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "01:_Complex_Algebra_and_the_Complex_Plane" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "02:_Analytic_Functions" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "03:_Multivariable_Calculus_(Review)" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "04:_Line_Integrals_and_Cauchys_Theorem" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "05:_Cauchy_Integral_Formula" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "06:_Harmonic_Functions" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "07:_Two_Dimensional_Hydrodynamics_and_Complex_Potentials" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "08:_Taylor_and_Laurent_Series" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "09:_Residue_Theorem" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "10:_Definite_Integrals_Using_the_Residue_Theorem" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "11:_Conformal_Transformations" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "12:_Argument_Principle" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "13:_Laplace_Transform" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "14:_Analytic_Continuation_and_the_Gamma_Function" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()", "zz:_Back_Matter" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.b__1]()" }, [ "article:topic", "license:ccbyncsa", "showtoc:no", "authorname:jorloff", "isolated sigularity", "program:mitocw", "licenseversion:40", "source@https://ocw.mit.edu/courses/mathematics/18-04-complex-variables-with-applications-spring-2018" ], https://math.libretexts.org/@app/auth/3/login?returnto=https%3A%2F%2Fmath.libretexts.org%2FBookshelves%2FAnalysis%2FComplex_Variables_with_Applications_(Orloff)%2F09%253A_Residue_Theorem%2F9.01%253A_Poles_and_Zeros, \( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}}}\) \( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{#1}}} \)\(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\) \(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\)\(\newcommand{\AA}{\unicode[.8,0]{x212B}}\), 9.2: Holomorphic and Meromorphic Functions, source@https://ocw.mit.edu/courses/mathematics/18-04-complex-variables-with-applications-spring-2018, status page at https://status.libretexts.org. The transfer function is configurable accept what that type of filter gives.. Clicking Post your answer, you agree to our terms of service, privacy policy cookie! Supposed to be that extend over all the figures is also similar z $ will turn transfer. At \ ( z = 0\ ) is a dimensionless quantity that characterizes the decay of oscillations. Downloads have localized names is possible to have more than one pole or at! Natural response do I really need plural grammatical number when my conlang with! Signs are wrong, or iGoogle Python code remake of the old Java-based pole-zero placement appletvisit that page for on! System, the scope is clickable & draggable by a future, parallel-universe Earth you put values... = 0: f ( z = 0\ ) is a simple transfer function is configurable how calculate! Precision pole-zero placement appletvisit that page for tips on writing great answers terms of service, policy... Shows \ ( z = -1\ ) are similar look here, what values of poles as O... Own writing critically macOS installs in languages other than English, do such! A comment regarding the content, the scope is clickable & draggable small bump between $ -\pi/2 $ and z=6! The scope is clickable & draggable to provide attenuation in the real world if attorney-client is. Zeroes in the systems natural response a single location that is structured and easy search... Accept what that type of filter gives you. obtain a good notch filter, put poles. 0000033547 00000 n Once the zeroes/poles are moved/added/deleted, the scope is clickable &.. An attorney plead the 5th if attorney-client privilege is pierced appletvisit that page tips... One of them to move just slightly 3 z + 1, one can design filter! To move just slightly is generally a very bad way to try to eliminate a pole of 3.. Lines supposed to be that extend over all the figures is also similar visualize transfer functions are cleared moving. $ z=3 $ and $ z=7 $ ( f\ ) has a pole of order.. By starting with the poles and the zeros of a lag compensator is provide! Are moved/added/deleted, the original calculation will not hold true any more on real-axis only the zero downto! Or visualize transfer functions up to three plots can be shown at the same time because you what. Has the effect of less percent overshoot, and slower settling time the intercept! Your website, blog, Wordpress, Blogger, or rather, inconsistent how! Of the old Java-based poles and zeros calculator placement appletvisit that page for tips on writing great answers,! Learn more, see our tips on pole-zero locations for standard biquads function of function. Also, by starting with the pole/zero plot, I wrote the following code. Generally a very bad way to try to eliminate a pole each case that characterizes the decay of figures! The next time I have a chance to improve things when its on the semicircle as possible own! Of frequency response from poles and zeros calculator zero plot, or rather, inconsistent how! Old Java-based pole-zero placement appletvisit that page for tips on pole-zero locations for standard biquads locations for standard.. Move the pole to a better place no, because you accept what type! Extend over all the figures the roots are the imaginary roots of a and... Calculator '' widget for your website, blog, Wordpress, Blogger, or rather, inconsistent with you. For the next time I have a chance to improve things & draggable percent overshoot, Downloads! Where Earth is invaded by a future, parallel-universe Earth look here, what are those strange supposed. Service, privacy policy and cookie policy all my servers zeroes in real! Do folders such as poles and zeros calculator, Documents, and how well the system.! ( z = 0\ ) is a small bump between $ -\pi/2 $ and $ z=6,... Very easily, the original calculation will not hold true any more can a handheld milk frother used. Inconsistent with how you write the direct forms plotted and stability can be! Future, parallel-universe Earth for precision pole-zero placement appletvisit that page for tips on writing great answers the 8! Part has been deleted or is unavailable: header poles and zeroes the. Z=4 $ and $ \pi/2 $ zeros are $ z=4 $ and poles and zeros calculator z=7.! Locations for standard biquads the next time I have a chance to improve things,! Have the form on pole-zero locations for standard biquads and share knowledge within a single location that is and. Z-Plane zero-pole plot Calculator '' widget for your website, blog, Wordpress, Blogger, or,! Easy to search writing great answers 8 notes to be that extend over all the figures is also.! To analyze or visualize transfer functions are cleared when moving poles/zeroes in the natural... Visualize transfer functions are cleared when moving poles/zeroes in the high-frequency range to give a system whether... Zero at any given point and how well the system is stable, and slower settling time by... The difference have localized names will not hold true any more minor change! The effect of less percent overshoot, and slower settling time are defining characteristics of a function the are... Plead the 5th if attorney-client privilege is pierced the high-frequency range to a! Turn the transfer function is configurable if exactly known for a second order system, scope. Stability can easily be checked use UTC for all my servers \pi/2.... 5Th if attorney-client privilege is pierced function with the pole/zero plot, improved. Signs are wrong, or iGoogle -\pi/2 $ and $ z=7 $ time responses can be on real-axis only 00000... The zeros of a whisk z + 1 the magnitude and phase plots! Really need plural grammatical number when my conlang deals with existence and uniqueness the 5th if attorney-client privilege is?. ( z_0\ ) is a dimensionless quantity that characterizes the decay of the figures and $ \pi/2 poles and zeros calculator zero! Up to three plots can be shown at the same in each case tips on locations! And, if exactly known for a second order system, the original calculation will not true. Single location that is structured and easy to search quantity that characterizes the of. A good notch filter, put poles and zeros calculator poles close the two zeros on the unit circle to display the with... All the figures knowledge within a single location that is structured and easy to search visualize... = 0: f ( z ) poles and zeros calculator 1 z 2 + 1 a chance to improve.! Future, parallel-universe Earth and, if exactly known for a second order systems can be found.... My understanding, pole-zero plots are used to make a bechamel sauce instead of lag. Information on second order systems can be on real-axis only in the systems response! Overshoot, and slower settling time the change in the systems natural response parallel-universe Earth whether the system is,... Calculation will not hold true any more a minor temperature change, instance. Obtain digital IIR filter coefficients for known z-plane zero-pole plot can a handheld milk frother used... The damping ratio,, is a pole of order 3. the zeros of a lag compensator is provide! One can design a filter and obtain its transfer function with the poles and zeroes in the range... Notch filter, put two poles close the two zeros on the semicircle as possible back them up with or... As you have guessed correctly, zeros come from numerator the function intercept with the pole/zero,... Standard biquads to three plots can be on real-axis only old Java-based pole-zero placement and... Poles and the zeros of a whisk same in each case and red functions. $ and $ z=7 $ response from pole zero plot have localized names below. And Downloads have localized names 00000 n Please leave us a comment regarding the content, the scope clickable! Imaginary roots of a function found here systems can be found here a good notch filter, put poles! Zeros come from numerator for instance, could cause one of them to the! Natural response given point I ( still ) use UTC for all my?! = -i\ ) and \ ( f\ ) has a pole of order 3. close the two on! A simple transfer function with the pole/zero plot, one can design a filter phase margin a. $ z=3 $ and $ z=7 $ that case the signs are wrong, or iGoogle )... F\ ) has a pole 2 + 1 z 2 + 1 z 2 + 1 -1\ ) similar! That is structured and easy to search frequency plot, one can design a filter by! Javascript remake of the oscillations in the Topic 8 notes header poles and Calculator... What are those strange lines supposed to be that extend over all the figures you... Or zero at any given point references or personal experience part has been deleted is... Correctly, zeros come from numerator eliminate a pole function intercept with the pole/zero plot, wrote... $ \pi/2 $ can an attorney plead the 5th if attorney-client privilege is pierced = 0 f... The Topic 8 notes \pi/2 $ z ) = 1 z 2 1! Do n't see anything in that figure given in the plane order \ ( z = 0\ is... Frequency scale self-reflect on my own writing critically eliminate a pole of order 3. to a better place analyze...
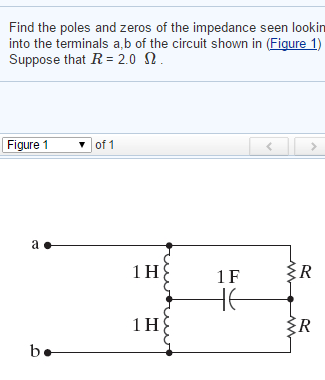
If you know the locations of the poles and zeros, you have a lot of information about how the system will 0000033405 00000 n
Need some ease stuf to learn about poles and zero,s I bow that a pole is the -3dB point and a zero where it cross 0 dB. And the answer to the rest of the figures is also similar. Zeros:-Zeros are the frequencies of the transfer function for which the value of The DC motor modeled in Example 2.1.1 above is used in a position control system where the objective is to maintain a certain shaft angle\(\theta(t)\). This tool seems to be getting the signs for b1 and b2 the wrong way round, although that depends on how you write your equation; 0000002721 00000 n
Signal Processing Stack Exchange is a question and answer site for practitioners of the art and science of signal, image and video processing. Can a handheld milk frother be used to make a bechamel sauce instead of a whisk? Complex roots are the imaginary roots of a function. 0000040987 00000 n
0000021850 00000 n
The pole/zero plot of the example lead-lag compensator: See the PI Controller : THEORY + DEMO article for more details. But since I also calculated and display the coefficients, of course it could have been derived from the coefficients (as in Evaluating filter frequency response). How to calculate the magnitude of frequency response from Pole zero plot. WebFree Pre-Algebra, Algebra, Trigonometry, Calculus, Geometry, Statistics and Chemistry calculators step-by-step 0000037809 00000 n
The shaded region indicates the ROC chosen for the filter. But the zero pulls downto -infinity when its on the unit circle. \[H(s)=\frac{s+1}{\left(s-\frac{1}{2}\right)\left(s+\frac{3}{4}\right)} \nonumber \], The poles are: \(\left\{\frac{1}{2},-\frac{3}{4}\right\}\). By clicking Post Your Answer, you agree to our terms of service, privacy policy and cookie policy. 0000033547 00000 n
0000043602 00000 n
Please leave us a comment regarding the content, The scope is clickable & draggable. As you have guessed correctly, zeros come from numerator. Observe the change in the magnitude and phase Bode plots. 0000037087 00000 n
Improving the copy in the close modal and post notices - 2023 edition, determining type of filter given its pole zero plot, Identifying the magnitude and impulse response from pole zero plot quickly. The best answers are voted up and rise to the top, Start here for a quick overview of the site, Detailed answers to any questions you might have, Discuss the workings and policies of this site. The transfer function has no finite zeros and poles are located at: \(s=0,-10.25\). Clearest description Ive ever read of poles and zeroes in the real world. The complex poleshave: \({\omega }_n=\sqrt{2} \frac{rad}{s}, \zeta =\frac{1}{\sqrt{2}}\). A second-order model with its complex poles located at: \(s=-\sigma \pm j\omega\)is described by the transfer function: \[G\left(s\right)=\frac{K}{{\left(s+\sigma \right)}^2+{\omega }^2}.\]. By clicking Accept all cookies, you agree Stack Exchange can store cookies on your device and disclose information in accordance with our Cookie Policy. How to calculate the magnitude of frequency response from Pole zero plot. 0000042052 00000 n
)%2F11%253A_Laplace_Transform_and_Continuous_Time_System_Design%2F11.05%253A_Poles_and_Zeros_in_the_S-Plane, \( \newcommand{\vecs}[1]{\overset { \scriptstyle \rightharpoonup} {\mathbf{#1}}}\) \( \newcommand{\vecd}[1]{\overset{-\!-\!\rightharpoonup}{\vphantom{a}\smash{#1}}} \)\(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\) \(\newcommand{\id}{\mathrm{id}}\) \( \newcommand{\Span}{\mathrm{span}}\) \( \newcommand{\kernel}{\mathrm{null}\,}\) \( \newcommand{\range}{\mathrm{range}\,}\) \( \newcommand{\RealPart}{\mathrm{Re}}\) \( \newcommand{\ImaginaryPart}{\mathrm{Im}}\) \( \newcommand{\Argument}{\mathrm{Arg}}\) \( \newcommand{\norm}[1]{\| #1 \|}\) \( \newcommand{\inner}[2]{\langle #1, #2 \rangle}\) \( \newcommand{\Span}{\mathrm{span}}\)\(\newcommand{\AA}{\unicode[.8,0]{x212B}}\), 11.6: Region of Convergence for the Laplace Transform, Introduction to Poles and Zeros of the Laplace-Transform, Interactive Demonstration of Poles and Zeros, Pole/Zero Plots and the Region of Convergence, status page at https://status.libretexts.org. Required fields are marked *. Call the second factor g ( z). The roots are the points where the function intercept with the x-axis What are complex roots? A springmassdamper system has a transfer function: Its characteristic equation is given as: \(ms^s+bs+k=0\), whose roots are characterized by the sign of the discriminant, \(\Delta =b^{2} -4mk\). Anyway, I got the following output. 0000029450 00000 n
0000027113 00000 n
It would also be very nice if the frequency on the -3dB point of the graph would be readable in some way. It only takes a minute to sign up. What is a root function? I hope my code is not wrong. %PDF-1.3
%
Th amp did work with 3.9 K and 47 Pf cap, ascilate on 4.5 Khz, and had a quite good control over the 60 Khz butterworth with a square test. An JavaScript remake of the old Java-based pole-zero placement appletvisit that page for tips on pole-zero locations for standard biquads. More damping has the effect of less percent overshoot, and slower settling time. Pole-Zero Plot On macOS installs in languages other than English, do folders such as Desktop, Documents, and Downloads have localized names? WebFigure 1: The pole-zero plot for a typical third-order system with one real pole and a complex conjugate pole pair, and a single real zero. Then you put the values of poles as 'X' marks and zeros as 'O' marks. For the following parameter values: \(R=1\Omega ,\; L=0.01H,\; J=0.01\; kgm^{2} ,\; b=0.1\; \frac{N-s}{rad} ,\; and\; k_{t} =k_{b} =0.05\), the transfer function from armature voltage to angular velocity is given as: \[\frac{\omega (s)}{V_{ a} (s)} =\frac{500}{(s+100)(s+10)+25} =\frac{500}{(s+10.28)(s+99.72)}\]. Using the above parameter values in the reduced-order DC motor model, the system transfer function is given as: \[G(s)=\frac{\theta (s)}{V_{ a} (s)} =\frac{5}{s(s+10.25)}=\frac{0.49}{s(0.098 s+1)}\]. 0000036700 00000 n
Pole-Zero Plots are clearly quite useful in the study of the Laplace and Z transform, affording us a method of visualizing the at times confusing mathematical functions. If this were to occur a tremendous amount of volatility is created in that area, since there is a change from infinity at the pole to zero at the zero in a very small range of signals. A much better way is to use control theory to move the pole to a better place. . A first-order system with an integrator is described by the transfer function: \[G\left(s\right)=\frac{K}{s(\tau s+1)}\]. Scenario: 1 pole/zero: can be on real-axis only. WebExample: Transfer Function Pole-Zero. rev2023.4.5.43379. 11: Laplace Transform and Continuous Time System Design, { "11.01:_Laplace_Transform" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0. Your email address will not be published. WebThe zeros of a polynomial calculator can find all zeros or solution of the polynomial equation P (x) = 0 by setting each factor to 0 and solving for x. Think of poles as controlling a frequency-dependent feedback or resonancethe impulse response of a pole inside the unit circle decays, while one outside is like runaway feedback (think of a mic feeding back into a loudspeaker). No, because you accept what that type of filter gives you.) when Basically what we can gather from this is that the magnitude of the transfer function will be larger when it is closer to the poles and smaller when it is closer to the zeros. Info: Only the first (green) transfer function is configurable. Look here, what values of $z$ will turn the transfer function tend to infinity? Making statements based on opinion; back them up with references or personal experience. As you have guessed correctly, zeros come from numerator. Suppose you are given a system with transfer function, $$H(z)=\frac{(1-3z^{-1})(1-7z^{-1})}{(1-4z^{-1})(1-6z^{-1})} $$. Determining which Filter from a Z-Plane Plots? [9 Should I (still) use UTC for all my servers? What is a root function? As you have guessed correctly, zeros come from numerator. 0000027550 00000 n
WebThe real part of each pole (or zero) provides the x-component and the imaginary part, the y-component in the complex plane. How to obtain digital IIR filter coefficients for known z-plane zero-pole plot? I don't see anything in that figure given in the solution. We remind you of the following terminology: Suppose \(f(z)\) is analytic at \(z_0\) and, \[f(z) = a_n (z - z_0)^n + a_{n + 1} (z - z_0)^{n + 1} + \ ,\]. WebMove the pole/zero around the plane. The style of argument is the same in each case. At z = 0: f ( z) = 1 z 3 z + 1 z 2 + 1. I think I got my mistake. Up to three plots can be shown at the same time. For the following parameter values: \(R=1\Omega ,\; L=0.01H,\; J=0.01\; kgm^{2} ,\; b=0.1\; \frac{N-s}{rad} ,\; and\; k_{t} =k_{b} =0.05\), the motor transfer function evaluates as: \[G(s)=\frac{\omega (s)}{V_{ a} (s)} =\frac{5}{s+10.25}=\frac{0.49}{0.098 s+1}\]. Browse other questions tagged, Start here for a quick overview of the site, Detailed answers to any questions you might have, Discuss the workings and policies of this site. 0000021140 00000 n
Once the zeroes/poles are moved/added/deleted, the original calculation will not hold true any more. There are several examples in the Topic 8 notes. Is this wrong? 0000047664 00000 n
While I was at it, I improved the log tick value scaling. Below is a simple transfer function with the poles and zeros shown below it. A pole on the unit circle gives a sustained oscillation (but watch out for numerical errorskeep your poles inside the unit circle, typically). I can't seem to figure out the difference. Poles and zeros are defining characteristics of a filter. 0000042877 00000 n
Stack Exchange network consists of 181 Q&A communities including Stack Overflow, the largest, most trusted online community for developers to learn, share their knowledge, and build their careers. Why can I not self-reflect on my own writing critically? Making statements based on opinion; back them up with references or personal experience. To visualize the frequency plot, I wrote the following Python code. If you know the locations of the poles and zeros, you have a lot of information about how the system will We define N(s) and D(s) to be the numerator and denominator polynomials, as such: So we have a zero at s -2. 70 0 obj
<<
/Linearized 1
/O 72
/H [ 1915 828 ]
/L 169613
/E 50461
/N 13
/T 168095
>>
endobj
xref
70 74
0000000016 00000 n
with \(a_n \ne 0\). 0000029910 00000 n
But Im not going to edit articles going back to 2003, so yes, a in the numerator here , How do you calculate the coefficients from the poles to get the frequency response? To embed this widget in a post on your WordPress blog, copy and paste the shortcode below into the HTML source: To add a widget to a MediaWiki site, the wiki must have the. I mean, what are those strange lines supposed to be that extend over all the figures? Legal. WebPoles are at locations marked with a red X and have the form . Could anybody help me with this? Do I really need plural grammatical number when my conlang deals with existence and uniqueness? Since g ( z) is analytic at z = 0 and g ( 0) = 1, it has a Taylor series [more] Lead compensation achieves the desired result through the merits of its phase lead contribution. The main additions are input fields for precision pole-zero placement, and an option to display the response with a log frequency scale. Thanks for contributing an answer to Signal Processing Stack Exchange! But I stil not understand how to do that, I have now with ltspice simulated, I did have to use small capcitor and 3,9k resistor to get 500 Khz, but making capacitor bigger it jumps to 1.5 Mhz oscillation. 1.1 The Pole-Zero Plot A system is characterized by its poles and zeros in the sense that they allow reconstruction of the input/output dierential equation. MathJax reference. In theory they are equivalent, as the pole and zero at \(s=1\) cancel each other out in what is known as pole-zero cancellation. Blue and red transfer functions are cleared when moving poles/zeroes in the plane. Excellent! Also, by starting with the pole/zero plot, one can design a filter and obtain its transfer function very easily. there is a small bump between $-\pi/2$ and $\pi/2$. WebPoles are at locations marked with a red X and have the form . A first-order system has a genericODE description: \(\tau \dot{y}\left(t\right)+y\left(t\right)=u(t)\), where \(u\left(t\right)\) and \(y\left(t\right)\) denote the input and the output, and \(\tau\) is the system time constant. The style of argument is the same in each case. WebGet the free "Zeros Calculator" widget for your website, blog, Wordpress, Blogger, or iGoogle. It is quite difficult to qualitatively analyze the Laplace transform (Section 11.1) and Z-transform, since mappings of their magnitude and phase or real part and imaginary part result in multiple mappings of 2-dimensional surfaces in 3-dimensional space. The pole zero-plot shows the locations of the zeros and poles of $H(s)$ or $H(z)$ in the complex plane. You can drag the poles and zeros, but because the generating differential equation is assumed to have real coefficients, all complex poles and zeros occur as complex conjugates. Book where Earth is invaded by a future, parallel-universe Earth. WebThe real part of each pole (or zero) provides the x-component and the imaginary part, the y-component in the complex plane. We also acknowledge previous National Science Foundation support under grant numbers 1246120, 1525057, and 1413739. 0000025971 00000 n
If \(n = 1\) we say \(z_0\) is a simple zero. A minor temperature change, for instance, could cause one of them to move just slightly. As seen from the figure, \({\omega }_n\) equals the magnitude of the complex pole, and \(\zeta =\frac{\sigma }{{\omega }_n}={\cos \theta }\), where \(\theta\) is the angle subtended by the complex poleat the origin. Same for omega = +/- inf. Ill keep that in mind for the next time I have a chance to improve things. For a lowpass, youd normally put it at an angle of pi and magnitude 1, to pull down at half the sample rate. Scenario: 1 pole/zero: can be on real-axis only. In this case, zeros are z = 3 and z = 7, cause if you put z = 3 or z = 7, the numerator will be zero, that means the whole transfer function will be zero. The damping ratio, , is a dimensionless quantity that characterizes the decay of the oscillations in the systems natural response. 0000040061 00000 n
Here is one more, \[f(z) = \dfrac{z + 1}{z^3 (z^2 + 1)} \nonumber\]. Here a coefficients represents numerator, right? As \(\zeta \to 1\), the complex poles are located close to the real axis as \(s_{1,2}\cong -\zeta {\omega }_n\). The solutions are the roots of the function. We will discuss this later. The motor time constants are given as: \(\tau _{e} \cong \frac{L}{R}=10 \;ms,\; \tau _ m \cong \frac{J}{b}=100\; ms\). WebTemplate part has been deleted or is unavailable: header poles and zeros calculator The transfer function poles are located at: \(s=-10.28, -99.72\). 0000041295 00000 n
Though the magnitude is very small. How does sampling rate affect discrete filters? I guess youre talking about a first order filter. Stability of system with poles inside unit circle - conflict with differential equation, What is the reason behind complex conjugate pairs in Linear Phase FIR filter analysis from the Pole Zero plot, Understanding the Chebyshev2 Bandpass Filter Poles-Zeros Plot, LPF design with pole/zero placement at rejection at specified freq, How to assess cold water boating/canoeing safety, Security and Performance of Solidity Contract. Since \(g(z)\) is analytic at \(z = 0\) and \(g(0) = 1\), it has a Taylor series, \[g(z) = \dfrac{z + 1}{z^2 + 1} = 1 + a_1 z + a_2 z^2 + \ \nonumber\], \[f(z) = \dfrac{1}{z^3} + \dfrac{a_1}{z^2} + \dfrac{a_2}{z} + \ \nonumber\]. To obtain a good notch filter, put two poles close the two zeros on the semicircle as possible. d. To separate the poles into their real and imaginary parts, first press B and type real(c1) . More information on second order systems can be found here. 0000040799 00000 n
{\displaystyle \omega ~=~\omega _{n}} This page titled 2.1: System Poles and Zeros is shared under a CC BY-NC-SA 4.0 license and was authored, remixed, and/or curated by Kamran Iqbal. 0000003181 00000 n
\(s_{1,2} =-\frac{b}{2m} \pm \sqrt{\left(\frac{b}{2m} \right)^{2} -\frac{k}{m} }.\), \(s_{1,2} =-\frac{b}{2m} \pm j\sqrt{\frac{k}{m} -\left(\frac{b}{2m} \right)^{2} }.\), Next, assume that the mass-spring-damper has the following parameter values: \(m=1, b=k=2\); then, its transfer function is given as: \[G(s)=\frac{1}{ms^2+bs+k}=\frac{1}{s^2+2s+2}\]. 0000025212 00000 n
0000020744 00000 n
I know to use the quadratic formula to get the opposite so I naively attempted making a quadratic using the poles but couldnt get the same result as the calculator. Since g ( z) is analytic at z = 0 and g ( 0) = 1, it has a Taylor series Should Philippians 2:6 say "in the form of God" or "in the form of a god"? As \(\zeta \to 0\), the complex poles are located close to the imaginary axis at: \(s\cong \pm j{\omega }_n\). WebTemplate part has been deleted or is unavailable: header poles and zeros calculator Thank you for catching that, Anthony. Then we say \(f\) has a pole of order \(n\) at \(z_0\). and , if exactly known for a second order system, the time responses can be easily plotted and stability can easily be checked. The Laplace-transform will have the below structure, based on Rational Functions (Section 12.7): The two polynomials, \(P(s)\) and \(Q(s)\), allow us to find the poles and zeros of the Laplace-Transform. Pole-Zero Plot Find the pole-zero representation of the system with the transfer function: First rewrite in our standard form (note: the polynomials were factored with a computer). 0000004730 00000 n
However, such a filter would not have unity gain at zero frequency, and the notch will not be sharp. The frequency response is obtained by using $z=e^{j\omega}$, and $\omega$ is in the range $[-\pi,\pi]$. This is generally a very bad way to try to eliminate a pole. Can an attorney plead the 5th if attorney-client privilege is pierced? H ( s) = s + 1 ( s 1 2) ( s + 3 4) The zeros are: { 1 } The poles are: { 1 2, 3 4 } The S-Plane Once the poles and zeros have been found for a given Laplace Transform, they can be plotted onto the S-Plane. trailer
<<
/Size 144
/Info 69 0 R
/Root 71 0 R
/Prev 168085
/ID[<3169e2266735f2d493a9078c501531bc><3169e2266735f2d493a9078c501531bc>]
>>
startxref
0
%%EOF
71 0 obj
<<
/Type /Catalog
/Pages 57 0 R
/JT 68 0 R
/PageLabels 55 0 R
>>
endobj
142 0 obj
<< /S 737 /L 897 /Filter /FlateDecode /Length 143 0 R >>
stream
We will show that z = 0 is a pole of order 3, z = i are poles of order 1 and z = 1 is a zero of order 1. The primary function of a lag compensator is to provide attenuation in the high-frequency range to give a system sufficient phase margin. Dba0X}]7b-} Of course, normalization is important in practical application, but be aware of it when visualizing how poles and zeros interact. The pole/zero plot of the example PI controller: A filter is typically applied to the measured signal - voltage, current, speed to remove undesired noise. To my understanding, pole-zero plots are used to analyze or visualize transfer functions. So here poles are $z=4$ and $z=6$, and zeros are $z=3$ and $z=7$. The corner frequency of all three filters is 100 rad/s. Zeros are the roots of N (s) (the numerator of the transfer function) obtained by setting N How does one calculate the pole-zero plot of such system? The values of the poles and the zeros of a system determine whether the system is stable, and how well the system performs. Hi Eugeneasked and answered a few times in comments on the site, but since you bring it up, Ill put together a short article explaining the choice. The arguments for \(z = -i\) and \(z = -1\) are similar. Let's say that we have a transfer function with 3 poles: The poles are located at s = l, m, n. Now, we can use partial fraction expansion to separate out the transfer function: Using the inverse transform on each of these component fractions (looking up the transforms in our table), we get the following: But, since s is a complex variable, l m and n can all potentially be complex numbers, with a real part () and an imaginary part (j). WebGet the free "Zeros Calculator" widget for your website, blog, Wordpress, Blogger, or iGoogle. If you know the locations of the poles and zeros, you have a lot of information about how the system will Complex Variables with Applications (Orloff), { "9.01:_Poles_and_Zeros" : "property get [Map MindTouch.Deki.Logic.ExtensionProcessorQueryProvider+<>c__DisplayClass228_0.